Projects and Accomplishments
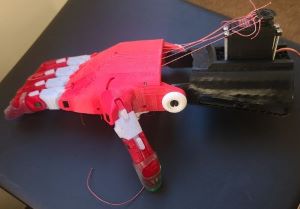
Students Get Hands-On Lesson in Prosthetics
NBC Connecticut visited my classroom to see the students' completed projects following our Bioengineering course. Students learned about electricity, by looking at both electrical impulses inside the body as well as through creating of robotic 3D-printed hands.
Check out the full story here!
Ford Motor Company: Impact of COVID on Transportation
Analyzed trends and conducted interviews to assess COVID-19's impact on the transportation industry, developing innovative product design concepts for Ford to enhance mobility solutions in a post-pandemic world.
Download Report on EVs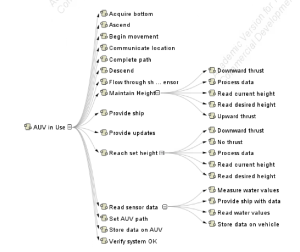
Autonomous Underwater Vehicle - Model-Based Systems
Developed a system model for an Autonomous Underwater Vehicle using CATIA Magic model-based systems engineering design software.
Download Sytems Model
Custom Walker
Worked directly with an elderly adult to design and build a walker that fit her needs.
Download Report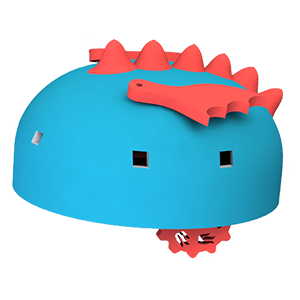
Voice-Controlled Laser Tag Robots
Created 2 robots that played laser tag with one another and were controlled via voice commands on a bluetooth app.
Check it out here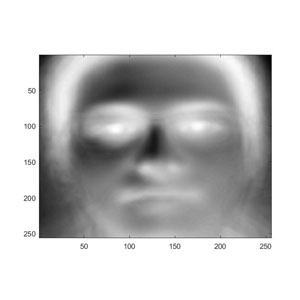
Facial Recognition Algorithm
Created a facial recognition algorithm using eigenfaces and fisherfaces. I was able to determine a person's identity with approximately 91% accuracy.
Download Report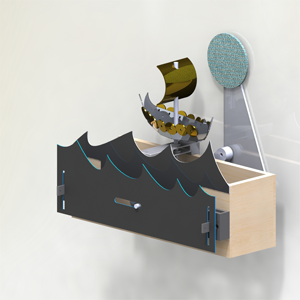
Kinematic Boat Sculpture
A project made for Introduction to Mechanical Prototyping. Was given a set or constraints and materials, and had to design and build a kinematic sculpture to fit within those constraints. Includes different transmissions and joints including gearing, a cam, a four-bar linkage, and a scotch-yoke joint.
Download Report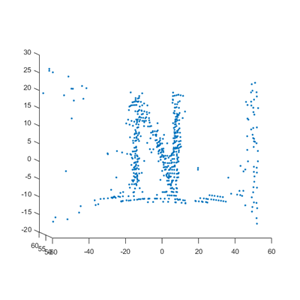
3D Object Scanner
Using two servos, and an IR distance sensor, was able to create a 3D scanner.
Download Report